



Фаҳмидани намудҳои фишор дар автоматизатсия: ченак, мутлақ ва дифференсиалӣ - имрӯз сенсори дурустро интихоб кунед
Дар автоматикунонии раванд, андозагирии дақиқи фишор барои бехатарӣ, кор ва самаранокии система муҳим аст. Аммо на ҳама нишондиҳандаҳои фишор яксонанд. Барои оптимизатсияи танзимоти худ, шумо бояд фарқияти байни фишори ченак, фишори мутлақ ва фишори дифференсиалиро фаҳмед - ҳар яки онҳо бо нуқтаҳои ягонаи истинод ва ҳолатҳои истифода. Ин дастур фарқиятҳоро содда мекунад ва ба шумо кӯмак мекунад, ки сенсори дурустро барои барномаи худ интихоб кунед.
Фишори ченак чист?
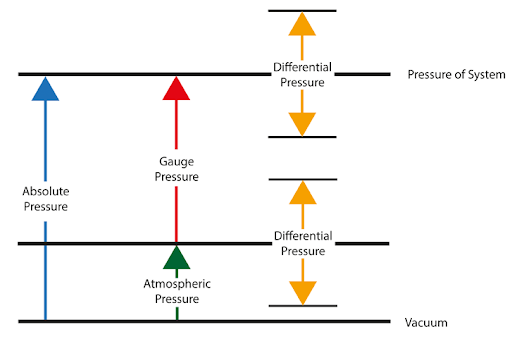
Фишори ченкунӣ (Сченак) фишорро нисбат ба фишори атмосфераи маҳаллӣ чен мекунад. Аксари асбобҳои саноатӣ ва ҳаррӯза, ба монанди ченакҳои шина ва системаҳои гидравликӣ - фишори ченкуниро нишон медиҳанд.
Формула:
Pченак= Пabs− Патм
Ҳолатҳои истифода:
Пневматика, пуркунии шина, насосхои обй
Эзоҳ: Фишори ченкунӣ метавонад манфӣ (вакуум) ё мусбат бошад.
✔ Идеалӣ барои: Мониторинги умумии саноатӣ, ки фишори муҳити атроф мӯътадил аст.
Фишори мутлақ чист?
Фишори мутлақ (Сabs) нисбат ба холигии комил чен карда мешавад. Он ҳам фишори атмосфера ва ҳам фишори ченкуниро ҳисоб мекунад, ки истинодҳои ҳақиқӣ ва собитро таъмин мекунад - махсусан дар контекстҳои илмӣ ё дақиқ муҳим.
Формула:
Pabs= Пченак+ Патм
Ҳолатҳои истифода:
аэрокосмос, термодинамика (масалан, конунхои газ), системахои вакуумй
✔ Идеалӣ барои: Барномаҳое, ки дақиқии баландро дар баландиҳои гуногун талаб мекунанд.
Фишори дифференсиалӣ чист?
Фишори дифференсиалӣ (ΔP) фарқияти байни ду нуқтаи фишор дар дохили система мебошад. Он ба фишори атмосфера алоқаманд нест ва барои муайян кардани ҷараён, муқовимат ё фарқияти сатҳ муҳим аст.
Формула:
ΔP = PA− ПB
Ҳолатҳои истифода:
Ҳисобкунакҳои ҷараёни об, филтрҳо, мониторинги сатҳи зарф
✔ Идеалӣ барои: Назорати раванд, ҳисобкунии суръати ҷараёни, мувозинати HVAC.
Интихоби дурусти сенсори фишор
Новобаста аз он ки шумо камераи вакуумро калибровка мекунед, ҷараёни оптималии ҳаворо нигоҳ доред ё мониторинги системаи гидравликии пӯшида, интихоби намуди дурусти фишор муҳим аст:
- Барои дақиқ дар муҳити тағйирёбанда сенсорҳои фишори мутлақро истифода баред.
- Барои амалиёти ҳаррӯзаи раванд сенсорҳои ченкуниро истифода баред.
- Барои чен кардани тағиротҳои дохилӣ дар байни ҷузъҳо интиқолдиҳандаҳои дифференсиалиро истифода баред.
Андешаҳои ниҳоӣ: Системаи худро бо фаҳмиши дурусти фишор оптимизатсия кунед
Фаҳмидани намудҳои андозагирии фишор маълумоти дақиқ, амалиёти бехатар ва назорати беҳтарро таъмин мекунад. Нагузоред, ки номувофиқатии байни сенсор ва навъи фишор ба системаи шумо осеб расонад.
Ба кӯмак дар интихоби сенсори дуруст барои раванди шумо ниёз доред? Имрӯз бо коршиносони мо барои роҳнамоии мувофиқ тамос гиред.
Бо коршиносони андозагирии фишори мо тамос гиред
Вақти фиристодан: 20 май-2025